6脚クローラ型不整地移動ロボットの開発
- 概要
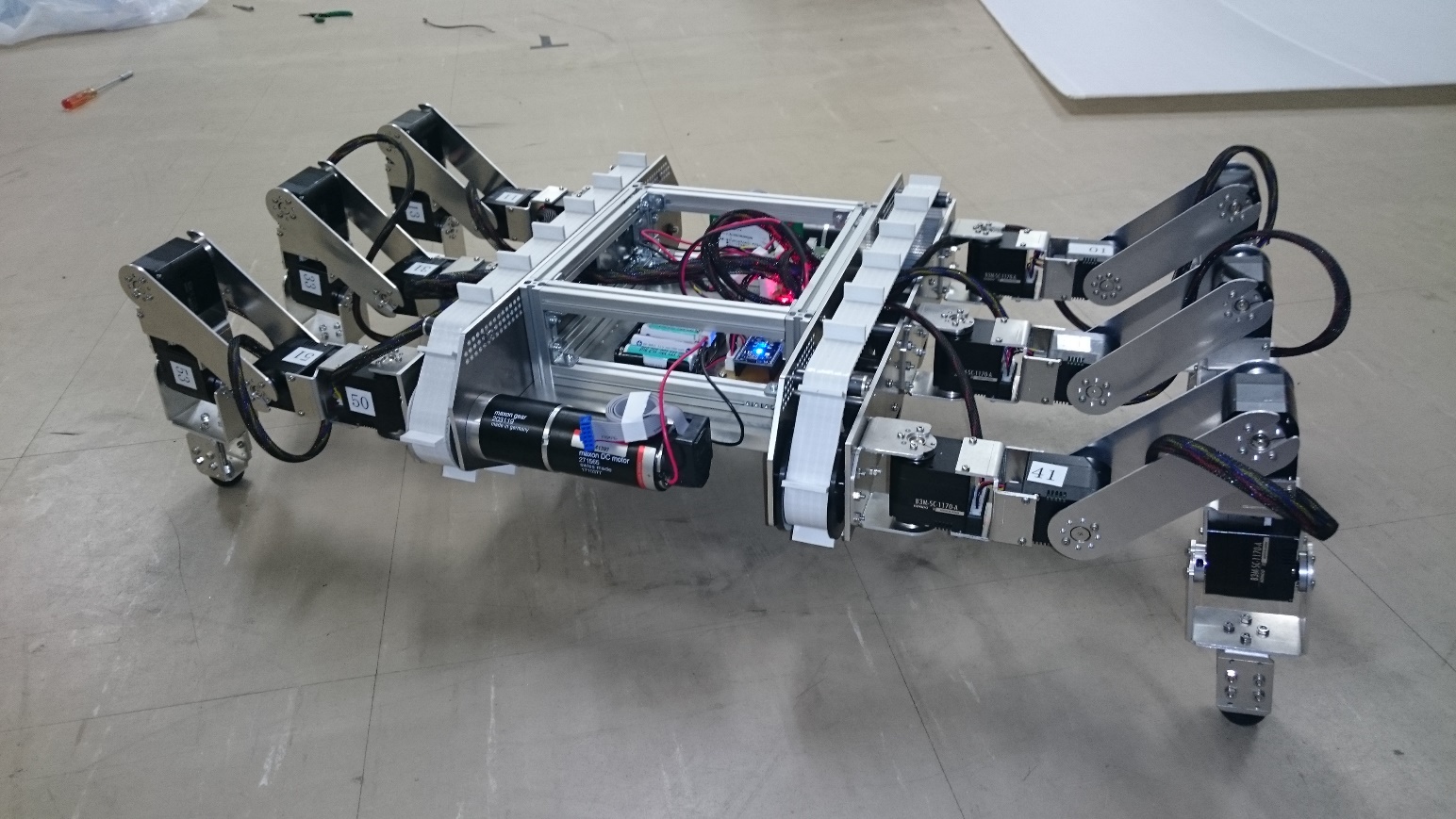
6脚を有するクローラ型不整地移動ロボットを開発した.このロボットの基本
移動性能として,斜面等の不整地での移動と6脚による歩行動作を確認した.ま
た,クローラのみでは移動困難な大きな溝での脚による補助による物体運搬し
ながらの乗り越え移動を検討し,実験により有効性を確認した.さらに,深度
とカメラ画像情報を得るセンサシステムを構築し,た画像を処理し,対象物を
検出することによる自律的作業動作を可能にした.
- 背景・目的
災害や事故等の危険な現場において,ロボットがレスキュー活動や関連作業を遂行することに期待が高まっている.ロボットは不整地現場を移動して情報収集するのみならず,そこで自ら作業を遂行する必要があるが,従来のロボットは移動機構が中心に考慮されており,作業への考慮が不十分である.具体的には,以下の問題がある.
●脚部にクローラ機構が備わっている不整地移動ロボットが考案されているが,移動しながらの作業が困難である.
●作業腕を有するクローラ型ロボットが開発されているが,その多くが腕が1個しかなく,物体の運搬などの作業ができない.
上記の問題を解決する構成として,複数の脚を有するクローラロボットが考えられる.特に,移動性能や作業能力の向上のためには6脚を有することが望ましい.
そのため,本研究では,胴体にクローラが装着された6脚を有する不整地移動ロボットを
開発し,路面状況に応じて移動形態を切り替えることで移動性能を向上し,現場での作業に有益となるよう移動しながらの運搬,把持,除去などの物体操作が可能となることを目的とする.
- 開発したロボット
- 発表論文等
-
Toyomi Fujita and Tiga Sasaki, "Consideration on a Crawler Robot with Six Legs,"
In Proceedings of The 2016 International Conference on Artificial Life and Robotics (ICAROB 2016), pp.88--91, 2016
-
Toyomi Fujita, Taiga Sasaki, and Yuichi Tsuchiya,"Hybrid Motions by a Quadruped Tracked Mobile Robot,"
In Proceedings of 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR2015), 2015
-
Toyomi Fujita and Yuichi Tsuchiya, "DEVELOPMENT OF A QUADRUPED TRACKED MOBILE ROBOT,"
In Proceedings of the ASME 2015 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2015,
-
瀨川渉,藤田豊己,``双腕クローラ型不整地移動ロボットによる RGB-D センサを用いた箱状対象物の把持位置検出の精度評価,''
平成28年東北地区若手研究者研究発表会 YS-14-E3, pp.133-134,2016.
-
佐藤郁弥,藤田豊己,``不整地作業用ロボットの形態可変型ハンド機構の開発,''
平成28年東北地区若手研究者研究発表会 YS-14-E4, pp.135-136,2015.
-
佐々木大雅,藤田豊己,``6脚クローラ型不整地移動ロボットの開発,''
平成28年東北地区若手研究者研究発表会 YS-14-E5, pp.137-138,2015.
-
瀨川渉,藤田豊己, ``双腕クローラ型不整地移動ロボットにおける RGB-D センサを用いた箱状対象物の把持位置検出,''
第16回計測自動制御学会システムインテグレーション部門講演会(SI2015),2G1_4,pp.1464--1467, 2015.
-
土屋雄一,佐々木大雅,藤田豊己, ``4脚クローラ型不整地移動ロボットによる板下の対象物回収動作,''
ロボティクス・メカトロニクス講演会2015 (ROBOMECH2015) 講演論文集, No.15-2, 1P2-F05, 2015.
本研究は公共財団法人JKAの平成27年度自転車等機械工業振興事業に関する補助(27-106)を受けて実施しました
研究紹介チラシ
研究報告書